.jpg)
.jpg)





© Alexander Engel KG
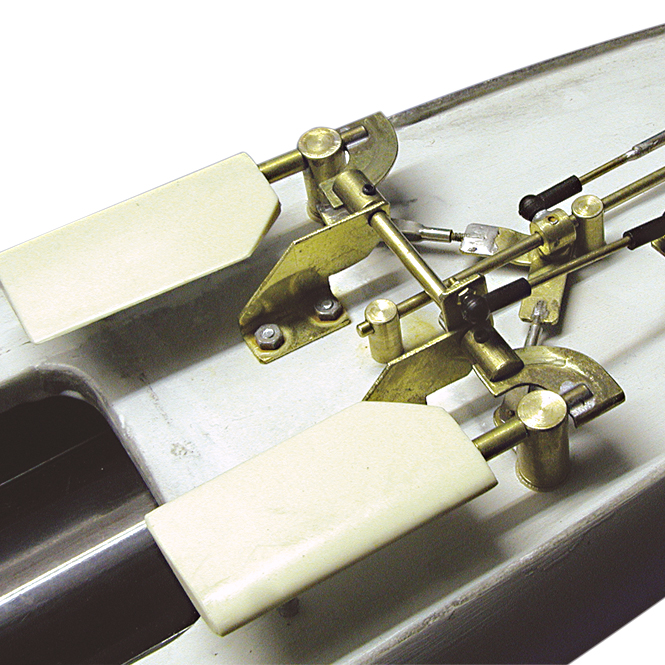
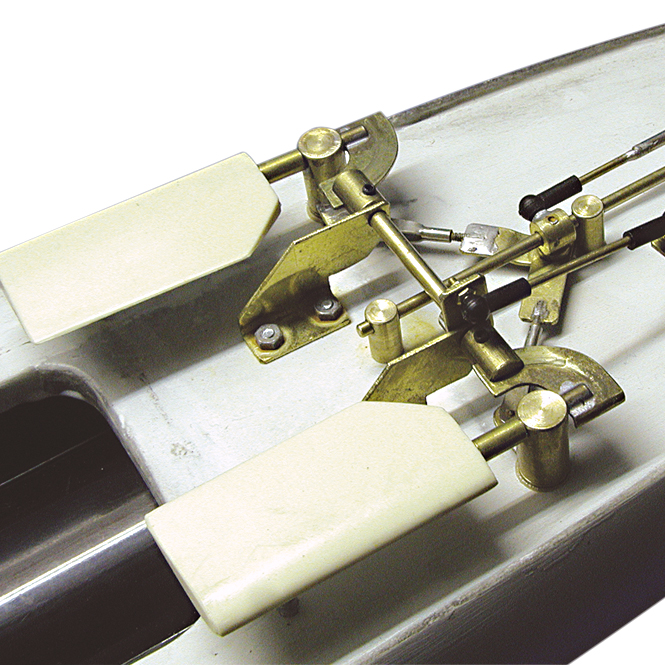
Retractable Bow Dive Planes AKULA K-317 Panther -with RME-
Previous product
Product 8 of 8
 Did you forget your password?
Did you forget your password?If you don't get an e-mail with your access data, please make sure that you have already registered with us. As soon as you are registered, you can login with your e-mail address and your password.
In case you still have problems logging in, please turn to us by e-mail: info@engel-modellbau.eu

